

Arquitectura de sistemas de un vehículo autónomo
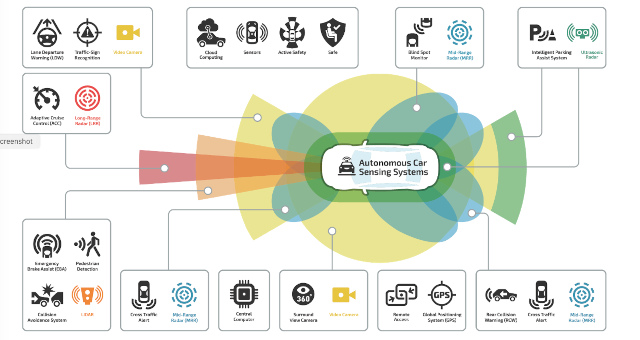
En un vehículo autónomo, una gran cantidad de diferentes sensores asumen las funciones visuales y auditivas del conductor (véase la figura 2). Todos ellos están conectados en red al sistema de un ordenador central que se responsabiliza de la seguridad de la conducción del vehículo en cualquier situación.
Los sensores incluyen un radar de radiofrecuencia de largo alcance para detectar vehículos, peatones y otros objetos en movimiento que se encuentren a gran distancia delante del vehículo, así como un subsistema de vídeo con una red convolucional de aprendizaje automático para detectar peatones, señales de tráfico y salidas de carriles. Otros sensores incluyen un sistema de cámara de vídeo de 360 grados que identifica la posición del vehículo con respecto a los objetos circundantes, independientemente de si están en movimiento.
Para conocer con precisión la ubicación del vehículo en todo momento, un potente sistema global de navegación por satélite (GNSS) permite detectar la posición del vehículo con una precisión asombrosa y una estimación de la navegación en centímetros cuando el vehículo entra en zonas urbanas estrechas o cuando atraviesa túneles.
Protocolos de red CAN y Ethernet fiables y resistentes interconectan los subsistemas con un nivel de latencia aceptable (< 5 ms). La tendencia es, cada vez más, que los subsistemas de vídeo y radar también incluyan motores de inferencia de aprendizaje automático para detectar y clasificar objetos en el punto de detección en vez de añadir carga de trabajo al sistema central.
Este método también reduce la sobrecarga de latencia en tiempo real, una cuestión de diseño fundamental para un vehículo que se mueve a más de 30 m/s (70 mph/112 kph). La latencia afecta a la oportuna toma de decisiones e impide utilizar la conectividad de la nube para cualquier tarea de conducción en tiempo real.
Por ejemplo, basándose en la velocidad anterior, una red de telefonía móvil 4G tiene una latencia típica de 60 milisegundos para un recorrido de ida y vuelta y se desplazará 1,8 metros. FlexRay y LIN son otros dos protocolos de red de automoción cuyo uso está muy extendido.
Sin embargo, el HDBaseT está empezando a perfilarse como un protocolo de red viable para los requisitos de infoentretenimiento y transmisión de vídeo del vehículo. El HDBaseT combina lo mejor de HDMI y Ethernet, y utiliza un solo cable para hacer converger el audio, el vídeo, Ethernet, 100 W de alimentación a través de Ethernet (PoE), los controles del sistema y el USB. Optimizado para su uso en diferentes dominios, el protocolo de automoción recomienda utilizar un único par sin protección para vincular dispositivos a una distancia de hasta 15 m. La integración de los diferentes elementos de transmisión en un único cable también ahorra peso en los cables, el trabajo de instalación y un coste de materiales considerable.
Para que un vehículo autónomo funcione de manera segura y fiable, todos los sistemas interconectados e interdependientes deben funcionar de manera continua y sin fallos. Si un sensor comienza a fallar o el circuito de monitorización del subsistema detecta un rendimiento deficiente, debe enviarse una alerta inmediata al ordenador central para que active la protección de circuitos y una parada de seguridad.




: cómo funciona y por qué es esencial en electrónica")




{kind=link}