

Artículo técnico con un enfoque inteligente para eliminar las perturbaciones térmicas en la medición de temperatura sin contacto escrito por Joris Roels, gerente de Marketing para sensores de temperatura en la compañía Melexis.
A medida que nos hacemos más conscientes de nuestra salud y nuestro entorno, la detección de temperatura es cada vez más relevante. Como resultado, es una función que ahora se incorpora a muchos dispositivos, incluidos los dispositivos de monitorización de la salud en forma de termómetros corporales médicos y dispositivos wearable inteligentes.
La detección de temperatura sin contacto se basa en la detección de energía emitida en la región de longitud de onda infrarroja. Cada objeto emite energía de esta manera, que se puede medir para calcular su temperatura. Sin embargo, a medida que los dispositivos de detección detrás de esto se hacen cada vez más pequeños, se vuelven más susceptibles al impacto de los choques térmicos, que pueden inducir errores de medición y ruido térmico.
En este artículo técnico, Melexis discute algunos de los principios detrás de la detección de temperatura sin contacto, así como los enfoques utilizados para minimizar los efectos del choque térmico. Luego, el artículo analizará un enfoque nuevo e inteligente para eliminar los efectos de las perturbaciones térmicas externas en sensores microminiatura.
Tecnología integrada de termopila MEMS
La tecnología de detección de temperatura sin contacto de termopila se usa cada vez más en aplicaciones médicas (incluida la atención médica en el hogar) e industriales, ya que es robusta, precisa y fiable.
Una termopila es simplemente un transductor electrónico que convierte la energía térmica en una señal eléctrica y funciona según el principio de que todo emite radiación térmica de infrarrojo lejano (FIR).
En términos eléctricos, una termopila se compone de varios termopares conectados en serie. Juntos, generan un voltaje que es proporcional a la diferencia de temperatura entre dos puntos; Esta diferencia da una medida de temperatura relativa.
Un sensor de termopila MEMS utiliza una membrana delgada, aislada térmicamente. Como tiene una masa térmica baja, se calienta rápidamente por el flujo de calor entrante, creando en consecuencia un diferencial de temperatura que la termopila puede reportar como una diferencia de temperatura. Al incorporar un termistor de referencia en el sistema MEMS, se puede generar una medición de temperatura absoluta.
En el corazón de esta técnica de medición se encuentra la Ley Stefan-Boltzmann que establece que la energía radiada por unidad de superficie de un cuerpo negro es proporcional a la cuarta potencia de su temperatura. Esto generalmente se expresa como:
J = ησT4
Donde:
- J = emitancia radiante [W/m2]
- η = emisividad (propiedad de superficie)
- σ = 5.67e-8 [W/m2/K4]
- T = temperatura superficial absoluta [K]
Suponiendo razonablemente que para los materiales no metálicos la emisividad (η) es aproximadamente 1, la temperatura de la superficie puede estar vinculada a la potencia emitida.
El desafío de la estabilidad al medir la temperatura sin contacto
La detección de temperatura se está volviendo cada vez más útil en una serie de aplicaciones y, como resultado, esta funcionalidad se está incorporando a muchos dispositivos, incluidos supervisores de salud y dispositivos wearable como gafas inteligentes, pulseras inteligentes y dispositivos usados dentro del oído; los llamados «hearables». Sin embargo, las soluciones de termómetro de contacto a menudo sufren de un mal contacto térmico con el sitio de interés. La detección de temperatura sin contacto que utiliza el principio FIR es ideal para estas nuevas aplicaciones, que comparten una necesidad común de sensores de temperatura cada vez más pequeños.
Para que los sensores de temperatura FIR se incorporen a los wearables, la tecnología debe ser miniaturizada. Si bien la miniaturización tiene muchos beneficios, también viene con sus propios desafíos; Con este tipo de sensor, la miniaturización puede tener un impacto negativo en la precisión de la medición de temperatura.
Como se describió anteriormente, los sensores de temperatura FIR se ven afectados por gradientes térmicos, o choque térmico, causados por el chip sensor que recibe radiación de múltiples fuentes, mientras que solo una cantidad limitada de esa radiación proviene del objeto que se está midiendo. Otras fuentes de energía térmica incluyen el propio encapsulado del sensor, lo que significa que parte de la señal generada es útil, mientras que otra es parasitaria.
En condiciones isotérmicas, donde la temperatura de la membrana coincide con la temperatura del encapsulado, no hay señal parásita, y la naturaleza diferencial de la tecnología de termopila cancela los efectos de la radiación del encapsulado. Sin embargo, en muchas aplicaciones es imposible mantener el sensor en condiciones isotérmicas.
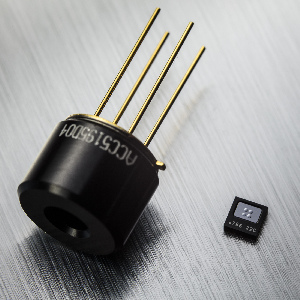
Si el pequeño sensor FIR está montado en una PCB, puede estar expuesto a la energía térmica de los componentes generadores de calor cercanos, como un microprocesador o un transistor de potencia. Los fabricantes de sensores FIR han intentado superar este problema colocando el elemento sensor en una envolvente de metal grande, como un encapsulado TO-can.
La importante masa térmica y la alta conductividad térmica del metal abordan los efectos de gradientes térmicos rápidos y choques en cierta medida, pero sucede que es menos adecuado en un entorno térmicamente dinámico. Por supuesto, el otro desafío es que las envolventes TO son relativamente grandes y no son adecuadas para dispositivos pequeños como dispositivos wearables y hearable.
Compensación activa de gradientes térmicos
Claramente, la solución TO-can no es apropiada para dispositivos de monitorización de salud de próxima generación y, solo por esa razón, debe descartarse en favor de una solución que pueda abordar mejor los desafíos del uso de sensores FIR de tamaño pequeño.
Al modelar y caracterizar varios escenarios y aplicar estos datos a través de sofisticados algoritmos de compensación, es posible modificar la salida de los modernos y pequeños sensores FIR para que se vuelvan insensibles al choque térmico.
Uno de los últimos dispositivos en llegar al mercado es el sensor FIR de tamaño pequeño MLX90632 de Melexis. Este es un sensor de temperatura infrarrojo sin contacto en un pequeño encapsulado SMD QFN y calibrado de fábrica para temperaturas ambiente entre -20 °C y +85 °C.
Está disponible en versiones comerciales y sanitarias. La versión sanitaria está optimizada para su uso alrededor de temperaturas del cuerpo humano donde tiene una precisión de ± 0.2 ° C. La versión de grado comercial tiene una precisión menor (± 1.0 ° C típica) pero está optimizada para usarse en un rango de temperatura de objeto mayor (-20 ° C a 200 ° C).
El valor de temperatura sin contacto medido es el promedio de cualquier cosa que esté dentro del campo de visión de 50 ° (FOV) del sensor y, utilizando este valor medido junto con las constantes de calibración y los sofisticados algoritmos de compensación a bordo, la temperatura ambiente y la temperatura del objeto pueden ser calculado
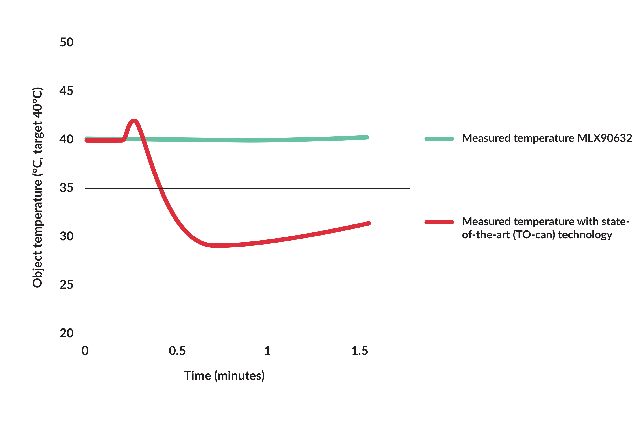
Para demostrar cuán efectiva es la compensación activa, Melexis realizó un experimento en el que se configuró un sensor MLX90632 y un sensor de última generación (encapsulado TO-can) para medir una fuente de referencia estable con una temperatura de alrededor de 40 ° C . Mientras se realizaban las mediciones, se colocó una fuerte fuente de calor cerca de los sensores; los resultados se pueden ver en la Figura 2.
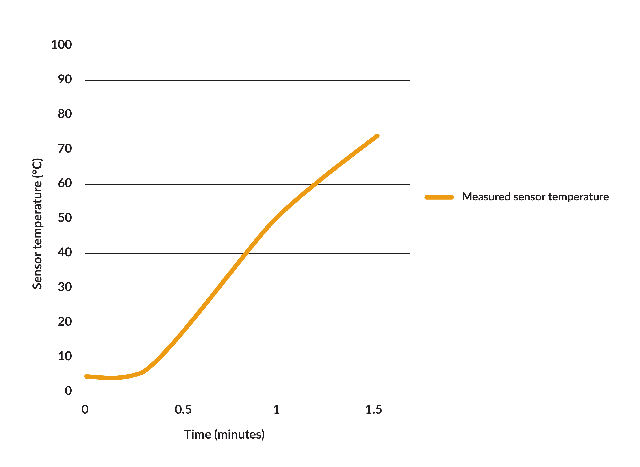
El gráfico muestra que la referencia estaba realmente a una temperatura de +40,05 °C y la temperatura del sensor alrededor de 2 ° C al comienzo del experimento. A medida que se aplicaba el calor, los sensores se sometieron a un choque térmico (de aproximadamente +60 °C / min) y se monitorizó la salida.
Durante toda la prueba, la lectura de temperatura del MLX90632 no se desvió en más de 0,25 °C, mostrando un rendimiento muy estable. Esto se logró gracias al avanzado algoritmo de compensación. El sensor TO-can muestra un error significativo, que ilustra que estos dispositivos no funcionan bien en condiciones tan difíciles.
Bloques de construcción internos del sensor
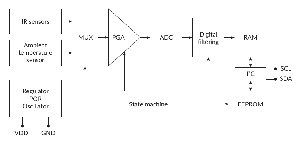
El sensor ultra pequeño contiene una termopila que captura la energía emitida por el objeto, así como un elemento para medir la temperatura del propio sensor. La señal de voltaje del elemento sensor de termopila se amplifica, digitaliza y filtra digitalmente antes de almacenarse en la RAM incorporada. La lectura del sensor de temperatura de referencia incorporado se procesa y almacena de la misma manera.
Una máquina de estado controla el tiempo y la funcionalidad del sensor, y el resultado de cada medición y conversión está disponible para el sistema más amplio (por ejemplo, microcontrolador) a través de la interfaz de comunicaciones I2C.
Las temperatura sin contacto (objeto y sensor interno) se pueden calcular a partir de los datos sin procesar utilizando un microcontrolador simple.
Resumen del artículo
La medición de temperatura sin contacto se está volviendo muy popular, especialmente en dispositivos portátiles como teléfonos inteligentes y dispositivos wearable que miden la temperatura corporal como parte de un régimen de atención médica domiciliaria. Sin embargo, hasta hace poco, la medición de temperatura ha tenido problemas con dos objetivos en conflicto.
En primer lugar, el elemento sensor debe ser lo suficientemente pequeño como para caber dentro de la aplicación y, en segundo lugar, debe instalarse en una envolvente metálica grande para proporcionar suficiente capacidad térmica para mitigar los efectos de los choques térmicos rápidos.
De esta forma, basado en la tecnología de detección de termopila, el MLX90632 de Melexis aborda este desafío aparentemente imposible. Mediante el uso de compensación activa a bordo y algoritmos sofisticados, el MLX90632 puede proporcionar una medición precisa de la temperatura sin contacto en las situaciones más exigentes, mientras se aloja en un encapsulado SMD ultra pequeño.








