

La aparición de la 10BASE-T1S
En principio, Ethernet se diseñó para redes multidrop y los datos se transmitían con acceso múltiple por detección de la portadora con detección de colisiones (CSMA/CD). Se trataba de una tecnología del tipo «entrega de mejor esfuerzo» que cumplía con los requisitos de red generales para ordenadores.
Sin embargo, al ser no determinística (es decir, la transmisión de datos no se puede garantizar en un intervalo de tiempo especificado) debido a las colisiones de paquetes, las redes Ethernet multidrop no se podían usar en aplicaciones en tiempo real en las que la seguridad es primordial. A medida que se añadían características de seguridad en los vehículos, como los sistemas de asistencia de controlador avanzado (SAAC), esta limitación era cada vez más problemática para un sector que, además, estaba buscando la manera de pasar a una nueva arquitectura zonal.
En las arquitecturas zonales, la conectividad se basa en una ubicación física y no en una función, como ocurre en las arquitecturas basadas en dominios. Este planteamiento tiene la ventaja de reducir el número de unidades de control electrónico (UCE), lo que reduce también el tamaño del mazo de cables. Además, se elimina la dependencia entre el hardware y el software y se pasa a una arquitectura orientada a servicios (SOA).
La 10BASE-T1S se desarrolló para satisfacer la necesidad de comunicaciones de datos fiables, determinísticas y de alta velocidad en el sector automovilístico e industrial. Se publicó como IEEE 802.3cg y como parte de la serie de estándares «Time-Sensitive Networking» (TSN). La diferencia entre la 10BASE-T1S y otras tecnologías del Ethernet para el automóvil es que es compatible con topologías multidrop en las que todos los nodos se conectan con el mismo cable de par trenzado sin apantallar.
Puesto que la implantación del bus solo requiere una interfaz de Ethernet (PHY) en cada nodo (de modo que ya no hace falta emplear topologías conmutadas o en estrella, como ocurre con otros tipos de Ethernet para el automóvil), el coste es más bajo. Aunque el estándar específica la compatibilidad con, al menos, ocho nodos, tiene cabida para muchos más con longitudes de bus de hasta 25 m. Otra nueva característica de este estándar es la prevención de colisiones en la capa física (PLCA), que evita que haya colisiones en el medio de red compartido. Esto garantiza una latencia máxima determinística en función del número de nodos de red y de la cantidad de datos transmitidos. Todos los nodos pueden transmitir. Si un nodo no tiene datos por transmitir, la opción de transmisión pasa al siguiente nodo: un uso más eficiente del ancho de banda disponible.
Las redes 10BASE-T1S están acopladas en CA, así que también pueden suministrar alimentación. Esto ahorra metros de cable y reduce el tamaño de los conectores, lo que aumenta la fiabilidad general de la red. La alimentación a través de la línea de datos (PoDL) ya está disponible en despliegues punto a punto y la IEEE está trabajando en normativizar esta característica para topologías multidrop. La tabla 1 muestra las características de capa física de la 10BASE-T1S.
| 10BASE-T1S | |
| IEEE | IEEE 802.3cg |
| Velocidad de transmisión | 10 Mbps |
| Codificación | 4B/5B (DME)×2 |
| Método de comunicación | Transmisión de medio dúplex Transmisión totalmente dúplex (opcional) |
| Topología | Multidrop entre pares |
La protección en redes 10BASE-T1S: problemas y soluciones
A pesar de la notable solidez de la conexión de Ethernet, la implantación en un entorno con mucho ruido eléctrico, como el del automóvil, presenta algunos desafíos. Los motores de los vehículos eléctricos (VE) son fuentes de ruido IEM conducido o radiado. Los transitorios eléctricos y la IEM son fuentes de ruido que pueden tener un efecto importante en la transmisión de datos de alta velocidad. Aunque los cables SPE de par trenzado se diseñaron para reducir los efectos del ruido en modo común, siempre va a haber algo de ruido inducido.
Hay distintas categorías de ruido conducido y radiado. El ruido en modo común aparece como una señal superpuesta en terminales de entrada y salida diferenciales y en los carriles de alimentación positivos y negativos. Para mitigar el ruido en modo común y conservar la transmisión ininterrumpida de señales diferenciales deseadas, se suelen emplear cebadores en modo común (CMC), compuestos por dos devanados alrededor de un núcleo de ferrita.
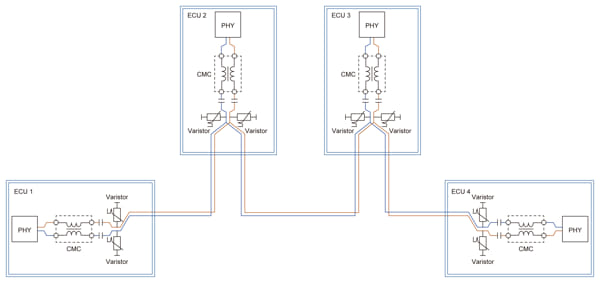
Las señales de ruido en modo diferencial van en direcciones opuestas y se pueden eliminar con un filtro adecuado, formado por una bobina, un condensador o un cebador en modo diferencial. La descarga electrostática (ESD) puede generar picos de tensión transitoria (nivel alto de dV/dt) que, a su vez, pueden inducir tensiones altas y perjudiciales en los cables, lo que dañaría los semiconductores y otros componentes. Se pueden emplear resistencias dependientes de la tensión (varistores) o supresores de tensiones transitorias (TVS) como protección frente a los efectos potencialmente dañinos de la ESD. La figura 2 muestra el uso combinado de CMC y varistores para proteger una red multidrop 10BASE-T1S típica con varias UCE.


: cómo funciona y por qué es esencial en electrónica")

: cómo funciona y por qué es esencial en electrónica")




{kind=link}