


Alain Bruno Kamwa, Corporate Product Manager Opto de Rutronik nos explica como la tecnología ToF permite detectar la posición, la forma y el movimiento de personas y objetos.
La detección tridimensional del entorno está ganando protagonismo en un creciente número de escenarios de uso, desde teléfonos móviles y vehículos a aplicaciones industriales. Un método es el Tiempo de Vuelo (Time of Flight – ToF) con sistemas LiDAR.
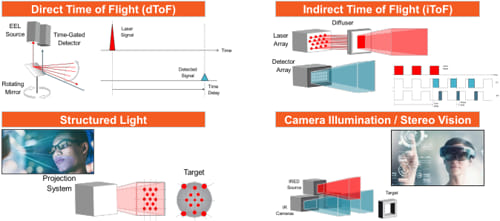
El principio fundamental es sencillo: una fuente de luz emite haces de luz que se reflejan en el entorno. Una cámara ToF correspondiente captura la luz reflejada y, por lo tanto, es posible calcular la distancia en función de la velocidad de la luz conocida y el tiempo de propagación de la luz medido.
Existen dos enfoques diferentes. Para ToF indirecto (iToF), se modula la fuente de luz y se detecta el cambio de fase de la luz reflejada. Como este método es relativamente “insensible” a la variación en el tiempo de medida interno, resulta especialmente adecuado para las distancias más cortas.
Con ToF directo (dToF), el sensor mide el tiempo directamente como se describe anteriormente. Lidar es un método clave para dToF. Al igual que el radar, se trata de un proceso de detección y alcance (DAR), con lidar usando ondas de luz y ondas de radio de radar. Un diodo láser pulsado en los sensores lidar emite un pulso de luz, que se utiliza para determinar la distancia entre el sensor y el “obstáculo”. Esto se consigue empleando una base de tiempo muy precisa. Unos cambios mínimos tendrían un impacto significativo en distancias cortas, motivo por el que lidar es más idóneo para medias y largas distancias de más de 100 m.
Campo de visión más amplio y mayor resolución
Se emplea un diodo láser como la fuente de luz en un sensor lidar. Dado que genera un haz de luz muy pequeño y extremadamente enfocado, solo se puede medir la distancia a un punto igualmente pequeño. Esto no resulta suficiente para la detección 3D, ya que es necesario para el reconocimiento facial, los sistemas avanzados de asistencia al conductor (ADAS) o incluso la conducción autónoma. Hay varias soluciones para poder ampliar el área detectada, conocido como campo de visión (FoV).
Con flash lidar, el haz de luz se dispersa por la óptica, aumentando así el ángulo de emisión. Sin embargo, esto crea una luz difusa y significativamente más débil. La tecnología de escáner lidar elimina esta deficiencia. Usa microespejos en movimiento para dirigir el haz de luz sobre el FoV y ser detectado en una especie de proceso de escaneo. No obstante, los sensores lidar de escáner son inadecuados para uso en vehículos. Con unas dimensiones de unos 10,5 × 6 × 10 cm, son muy “grandes”, mientras que los espejos en movimiento son susceptibles a las vibraciones, los impactos, el polvo y las temperaturas extremas, que no se pueden evitar en los vehículos.
Los sensores lidar en estado sólido son más pequeños y robustos. Utilizan semiconductores en lugar de componentes mecánicos a la hora de dirigir el haz de luz. En lidar con espejos basados en tecnología MEMS, existe una matriz de microespejos que alternan entre dos posiciones miles de veces por segundo debido a los campos electrostáticos.









{kind=link}